

多模态轮腿分离四足机器人设计
发布时间:2024-07-11
成果简介:
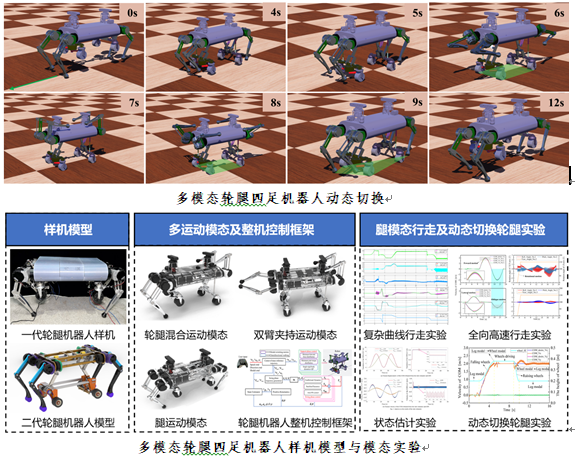
带轮毂的腿式机器人拥有高度敏捷和多运动功能的潜力,可在山地侦查、施工监测与检查及核辐射等高危、非结构环境中执行特殊任务。由于当前轮腿四足机器人多采用轮腿串联式结构,这将导致轮腿模态转换时须采取效率较低的静态切换,同时,串联于腿部末端的轮毂受限于部分地形。太原理工大学先进成形与智能装备研究团队研发出一种多模态轮腿四足机器人,该机器人是现有轮腿四足机器人家族的互补成员,可根据不同环境自主进行轮、足式及其混合模态的相互动态切换,有效提高运行效率。目前该机器人已实现物理环境中腿部结构的数字孪生仿人体跳跃缓冲测试及模拟环境中多模态动态切换和腿模态的平地高速和特殊地形全方位行走。
技术成熟度:7级。
成果应用情况:样机室外行走测试阶段。
成果展示: